


Inhalt
Motorische Lernprinzipien
Heterarchie des Nervensystems
Selbstbild und Gleichgewicht
Möglichkeiten
Einleitung
Dieser Text ist meiner Bachelorarbeit entnommen. Ich habe ihn aus dem Niederländischen ins Deutsche übersetzt, ihn überarbeitet und die Bildsequenzen von Muybridge hinzugefügt.
Thema ist die Analyse des motorischen Lernens. Die Grundidee ist die, dass dem Bewegen eine Art Grammatik zugrunde liegt. Jeder Tätigkeit liegt ein Grundbewegungsschema zugrunde, welches in unterschiedlichen Zusammenhängen angepasst und variiert wird.
Zunächst betrachten wir eine gewöhnliche Handlung. Anhand der Tätigkeit des Ballfangens, versuche ich Ihnen deutlich zu machen, wie kompliziert eine so einfache Handlung ist:
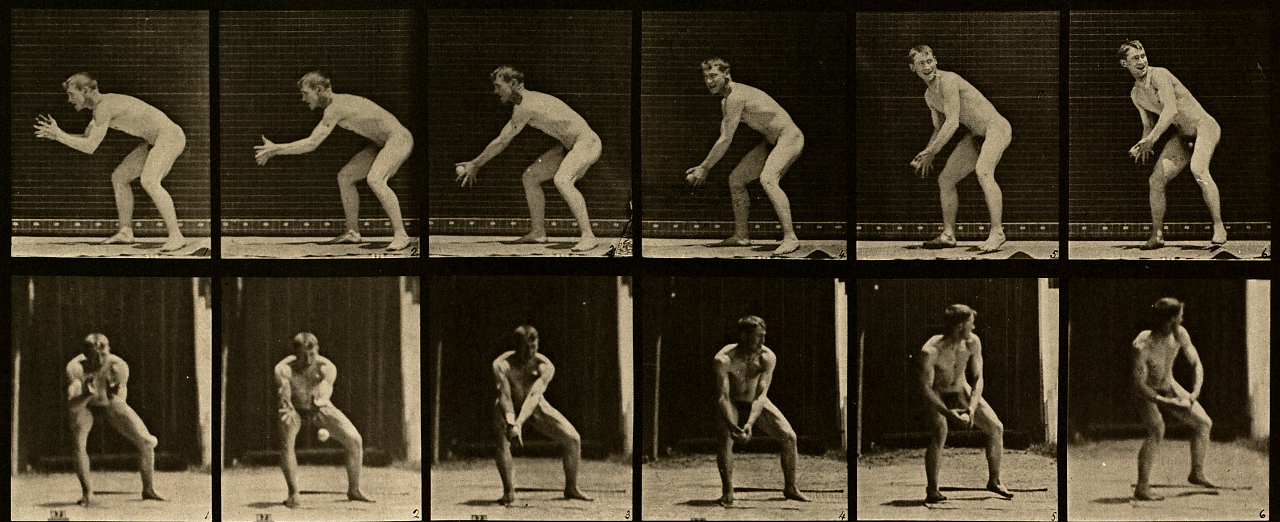
Abb. 1: Fangen des Balls
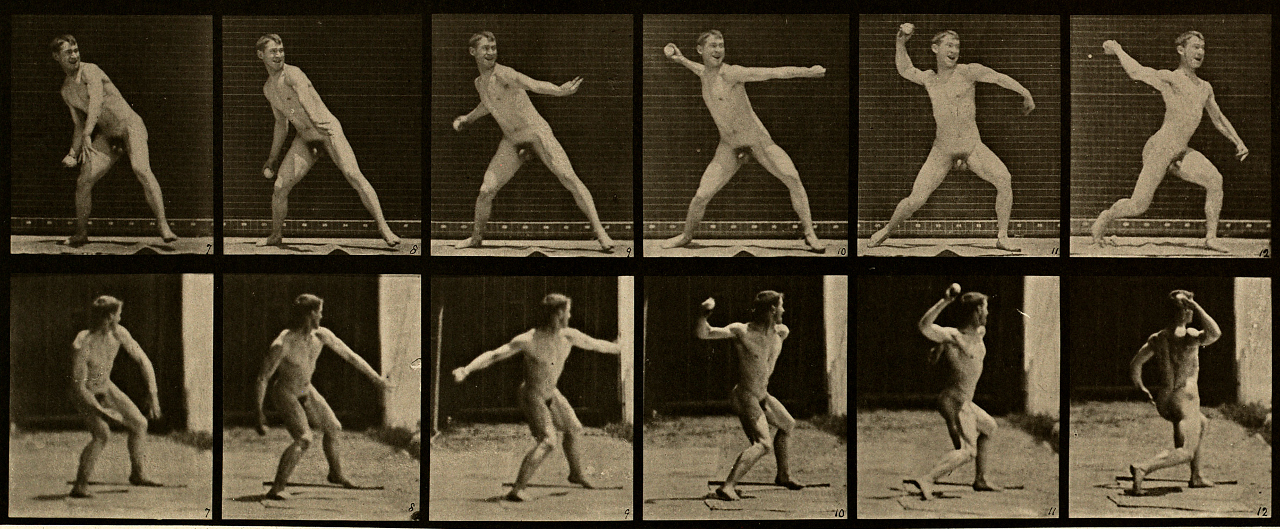
Abb. 2: Werfen des Balls
Das Fangen eines Balles wird folgendermaßen unterteilt:
• Die Transport- und Greifphase
• Die Rolle des Visus
• Die Rolle der Propriozeption
• Die Integration der sensorischen Information
Das Fangen eines Balls wird in eine schnelle Phase unterteilt, die Transportphase, wobei die Hand zum Objekt geführt wird und in eine langsame Phase, die eigentliche Fangbewegung. Während der Transportphase sind vor allem die proximalen Muskeln aktiv. Um die Hand an die richtige Stelle zu bringen, muss man Kenntnis der Position des Objekts im Raum haben, wodurch die Richtung der Streckbewegung programmiert werden kann.
Während der Greifphase wird die Hand in Erwartung des kommenden Kontakts mit dem Objekt antizipierend bewegt. Hier sind vor allem die distalen Muskeln aktiv. Dabei gelten folgende Gesetzmäßigkeiten. Die Greifphase beginnt bereits während der Transportphase, bei der die Finger sich während der Transportphase öffnen. Bei kleinen Objekten wird bereits zum Ende der Transportphase das Greifmoment eingeleitet. Je mehr Genauigkeit erforderlich ist, je früher die Hand geöffnet wird, um sich auf die physikalischen Eigenschaften des Objektes einzustellen. Interessanterweise erhöht sich die Präzision der Bewegung je langsamer sie ist.
Der Visus liefert Informationen über die Gestalt des Objekts wodurch die Position und dessen Form definiert werden kann. Durch visuelle Rückmeldung kann die Greifbewegung korrigiert werden. Dabei gilt, je langsamer die Bewegung, desto wichtiger ist die Rolle des Visus.
Afferente Information aus den Gliedern ist notwendig, sowohl für die Einleitung als auch für die Kontrolle der Bewegung. Die Propriozeption hat zusätzlich zu ihrer Funktion als Rückkopplungsquelle während der Bewegung eine wichtige Rolle im Hinblick auf dessen Programmierung. Das zentrale Nervensystem erhält kontinuierlich Information über die aktuelle Position des Körpers und dessen Gliedmaßen.
Das visuelle System und das propriozeptive System müssen aufeinander abgestimmt sein. Diese Integration findet in den blickmotorischen Zentren des Hirnstamms statt.
Wenn wir uns nach etwas ausstrecken kontrahieren zuerst die Haltungsmuskeln, ausgehend von den Beinen, und erst danach beginnt die Greifhandlung. Die Integration von Haltungs- und Bewegungsmuskeln ist eine Voraussetzung für koordinierte Arm-und Kopfbewegungen.
Wenn also die posturale Kontrolle Störungen (zum Beispiel durch eine Knieverletzung) aufweist, können alltägliche Handlungen (so wie etwas aufheben) Ursache sein für das Fortbestehen eines schmerzhaften Musters. Man denkt nicht an seine Beine, um etwas vom Boden aufzuheben, und richtet seine Aufmerksamkeit mehr auf das Ziel der Handlung. Dies hat zur Folge, dass die Haltungskontrolle (Stabilisierung des Rumpfes) über kompensatorische (z.B. antalgische) Mechanismen gewährleistet wird.
Auf diese Weise unterhält das gesamte System seine eigene Dynamik. Es muss ein Weg gefunden werden, die Selbstverständlichkeit einer alltäglichen Handlung wieder zu erreichen und deshalb werde ich im Folgenden die motorischen Lernprinzipien näher betrachten.
Motorische Lernprinzipien

Die Engrammformung
Die Engramms Theorie ist ein Beispiel für einen Closed-Loop-Ansatz, was bedeutet, dass sowohl die Re-Afferenz als auch der motorische Auftrag einen kohärenten Zyklus bilden.
Ein Engramm ist eine Art Abbild der idealen Bewegung, sie zeigt an, wie eine solche Bewegung aussieht, wie sie sein bzw. sich anfühlen soll.
Die Bildung eines Engramms kann in drei Phasen unterteilt werden:
- Der Aufbau einer sensorischen Engramms. Der Begriff bedeutet so viel wie Gedächtnisabdruck oder Erinnerungsspur. Sobald sich das sensorische Engramm gebildet hat, gibt es eine interne Referenz. Man weiß, wie eine ideale Bewegung aussieht. Mit diesem Engramm können die eigenen Bewegungsversuche verglichen werden.
- Die Übungsphase. Nach der Bildung eines sensorischen Engramms übt man sich an der Bewegung. Die sensorische Rückkopplung der eigenen Bewegung (Re-Afferenz) erreicht das eigene Nervensystem. Sie wird mit dem sensorischen Engramm verglichen. Unterschiede werden aufgespürt und die motorischen Aufträge entsprechend korrigiert. Nach vielfacher Wiederholung hat das Nervensystem gelernt die richtige Bewegung zu generieren und man sagt, das motorische Engramm ist herangereift. Da wir die Neigung haben während der Übungsperiode unsere interne Referenz zu verändern, bedarf es zusätzlicher Instruktionen. Auf diese Weise können Fehler im sensorischen Engramm korrigiert werden.
- Die Phase der motorischen Reife: Nach einer häufig langwierigen Entwicklung hat sich das motorische Engramm geformt: Die Fertigkeit ist einstudiert. Ein fortlaufendes Vergleichen mit einer internen Referenz ist nicht mehr nötig. Automatische wird die richtige Bewegung ausgeführt. NB. Diese Theorie hat ihre Gültigkeit hauptsächlich für langsame Bewegungen und gilt für eine bestimmte Fertigkeit. Am Ende des oben beschriebenen Prozesses haben wir also eine bestimmte Fertigkeit im Zusammenhang mit einem bestimmten Kontext (Stand, Liegen, Sitzen) gelernt. Jetzt muss diese integriert werden in unterschiedlichen Zusammenhängen. Damit beschäftigt sich die Schematheorie von Schmidt.
Die Schemabildung
Das oben stehende motorische Lernprinzip kann die Komplexität alltäglicher Handlungen erklären. Der oben beschriebenen Theorie müsste es für jede Handlung ein zugehöriges Engramm geben. Diese Erklärung reicht aber für den Alltag nicht aus, da hier keine Bewegung einander gleicht.
Schmidt meint dazu auch, dass es anstelle eines Engramms ein generalisiertes Motorprogramm gibt, welches in unterschiedlichen Zusammenhängen flexibel angewendet werden kann. So können wir beispielsweise einen Hund als solchen identifizieren, obwohl wir diese Rasse womöglich noch nie gesehen haben. Es muss so etwas wie eine abstrakte Regel bestehen.
Die Ausführung einer Handlung geschieht folgendermaßen:
- Es besteht ein generalisiertes Motorprogramm, das Recall-Schema.
- Bevor die Bewegung ausgeführt wird, müssen die Vorgabewerte festgelegt werden. Gemeint sind die momentane Stellung des Körpers und die Position im Raum. Hiervon ausgehend wird die Bewegung eingeleitet und koordiniert.
- Zum Beispiel: Wenn wir eine Tasse vom Tisch greifen möchten, definieren wir die Handlung ‚eine Tasse greifen‘ als Schema. Die Bewegung verändert sich selbstverständlich, wenn wir sie im Sitzen oder aus dem Liegen ausführen möchten.
Drei unterschiedliche Schlagvarianten eines Batters:
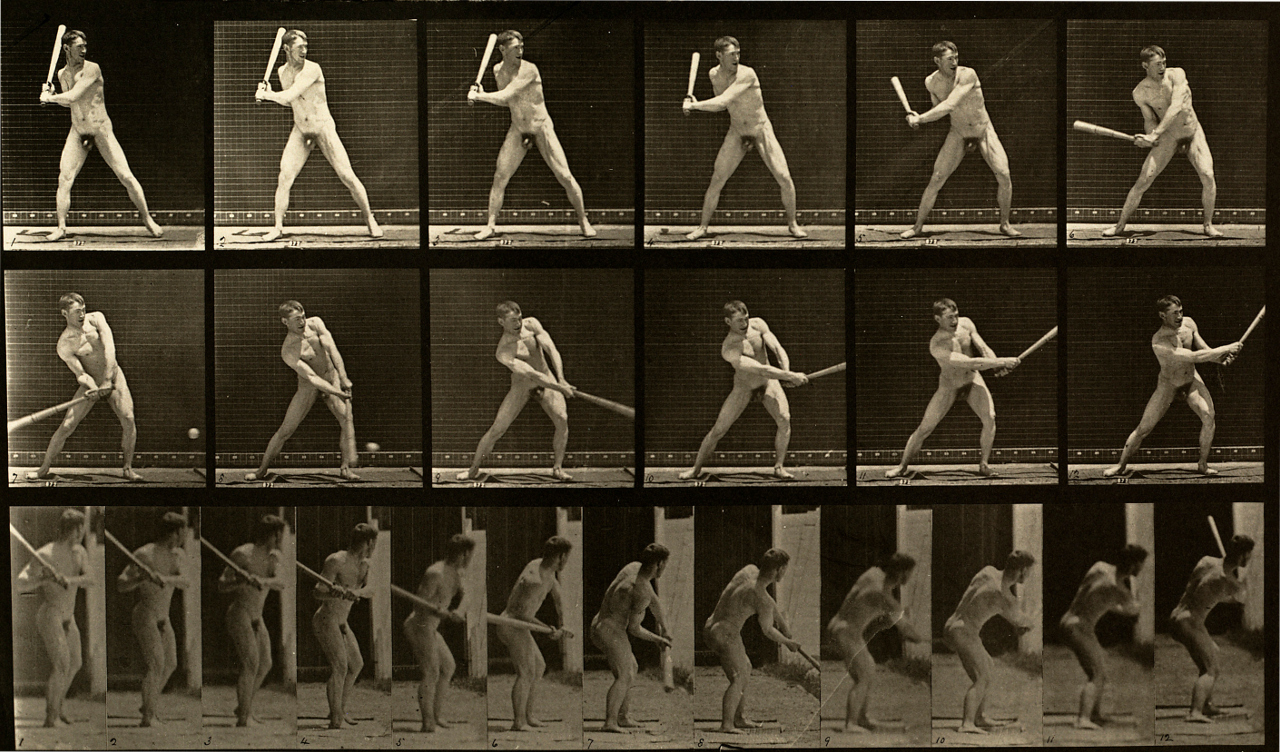
Abb. 3a
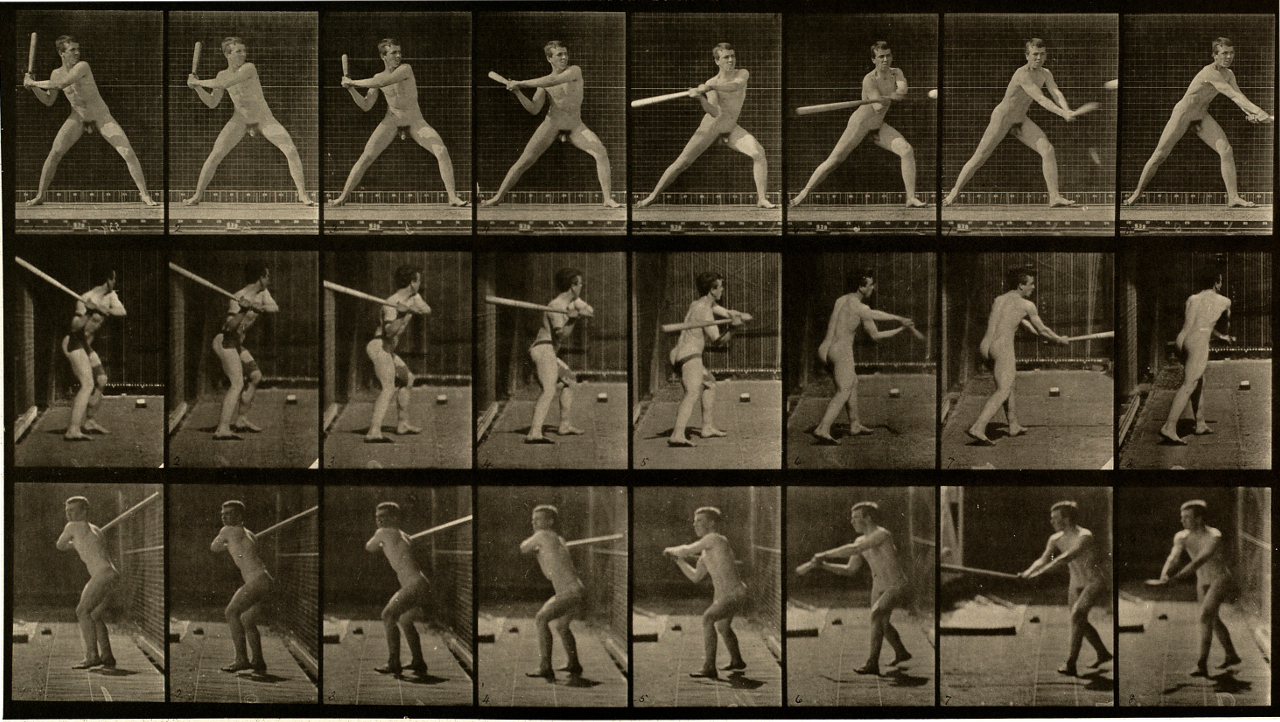
Abb. 3b
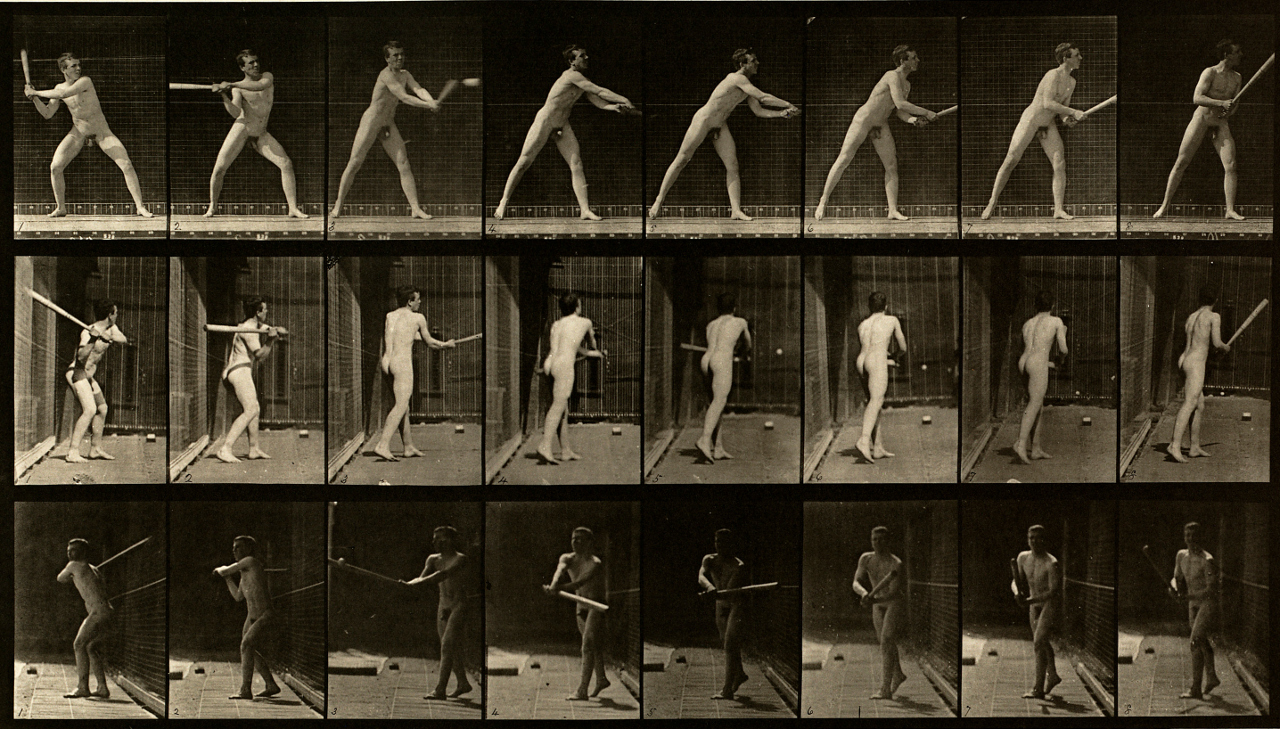
Abb. 3c
Schemaentwicklung
Anfangsbedingungen
Um auf die richtige Weise bewegen zu können, muss die Person über Information über den Zustand der Muskulatur und das Umfeld verfügen. Diese werden vor der Respons aus den unterschiedlichsten Rezeptoren abgeleitet; sie enthalten auch propriozeptive Informationen über die Position der Gliedmaßen im Raum und visuelle und auditive Informationen über den Zustand der Umgebung. Nach der Bewegung werden diese Ausgangsbedingungen gespeichert.
Vorgabewerte (Bewegungsparameter)
Das Motorprogramm ist von allgemeiner Art. Allerdings variiert jede Bewegung in Bezug auf Kraft, Schnelligkeit und Genauigkeit. Die Vorgabewerte enthalten diese veränderlichen, an die Situation angepassten Anforderungen. Sie beschreiben die in einem bestimmten Moment notwendigen Anforderungen. Auch diese Informationen werden nach der Ausführung gespeichert.
Der Verlauf der Bewegung (Wiedererkennungsschema)
Die sensorischen Informationen und das tatsächliche Ergebnis werden zusammen gespeichert, um zwischen den sensorischen Informationen, dem tatsächliche Ergebnis und den Anfangsbedingungen einen Zusammenhang zu entwickeln.
Wenn eine Person eine neue Bewegung ausführt, und das gewünschte Ergebnis und die ursprünglichen Bedingungen bekannt sind, dann ist das Schema in der Lage, die Vorgabewerte und die zu erwartenden sensorischen Folgen der Bewegung zu generieren. Dies geschieht durch Bestimmen des Verhältnisses zwischen den sensorischen Informationen ähnlicher, zuvor bereits ausgeführter Bewegungen und dessen Ergebnissen.
Auf dieser Grundlage können die sensorischen Konsequenzen bestimmt werden. Das am besten passende Motorprogramm wird ausgewählt und die Bewegung wird ausgeführt. Während der Bewegung werden die zu erwartenden sensorischen Effekte mit den tatsächlichen sensorischen Informationen verglichen. Eine Abweichung davon beschreibt den Fehler der dem Schema zurückgeführt wird.
Die Theorie geht davon aus, dass frühere sensorische Signale zusammen mit den tatsächlichen sensorischen Konsequenzen gespeichert werden. Im Laufe der Zeit ergibt sich nun eine Beziehung, ein Schema, dass die empfangene Ergebnisse mit dem sensorischen Input (propriozeptiver Feedback) vergleicht.
Wenn dieses Schema stark genug entwickelt ist, wird es möglich schnelle Vergleiche auszuführen. Der hierbei entstehende Fehler kann durch die Person benannt werden.
Während des Lernprozesses sind hierzu auch adäquate Feedbackquellen wichtig. Gemeint ist ein Lehrer oder ein Therapeut etwa.
Fehler in der Bewegungsausführung
Es werden zwei Fehlertypen unterschieden: Fehler in der Bewegungswahl und Fehler in der Bewegungsausführung.
Fehler in der Bewegungswahl:
Diese Arten von Fehler treten auf als Folge von falscher oder nicht richtiger Wahrnehmung der Umgebung: Z. B. ein Catcher im Baseball, der die Geschwindigkeit des Balles falsch einschätzt und ihn infolgedessen verfehlt.
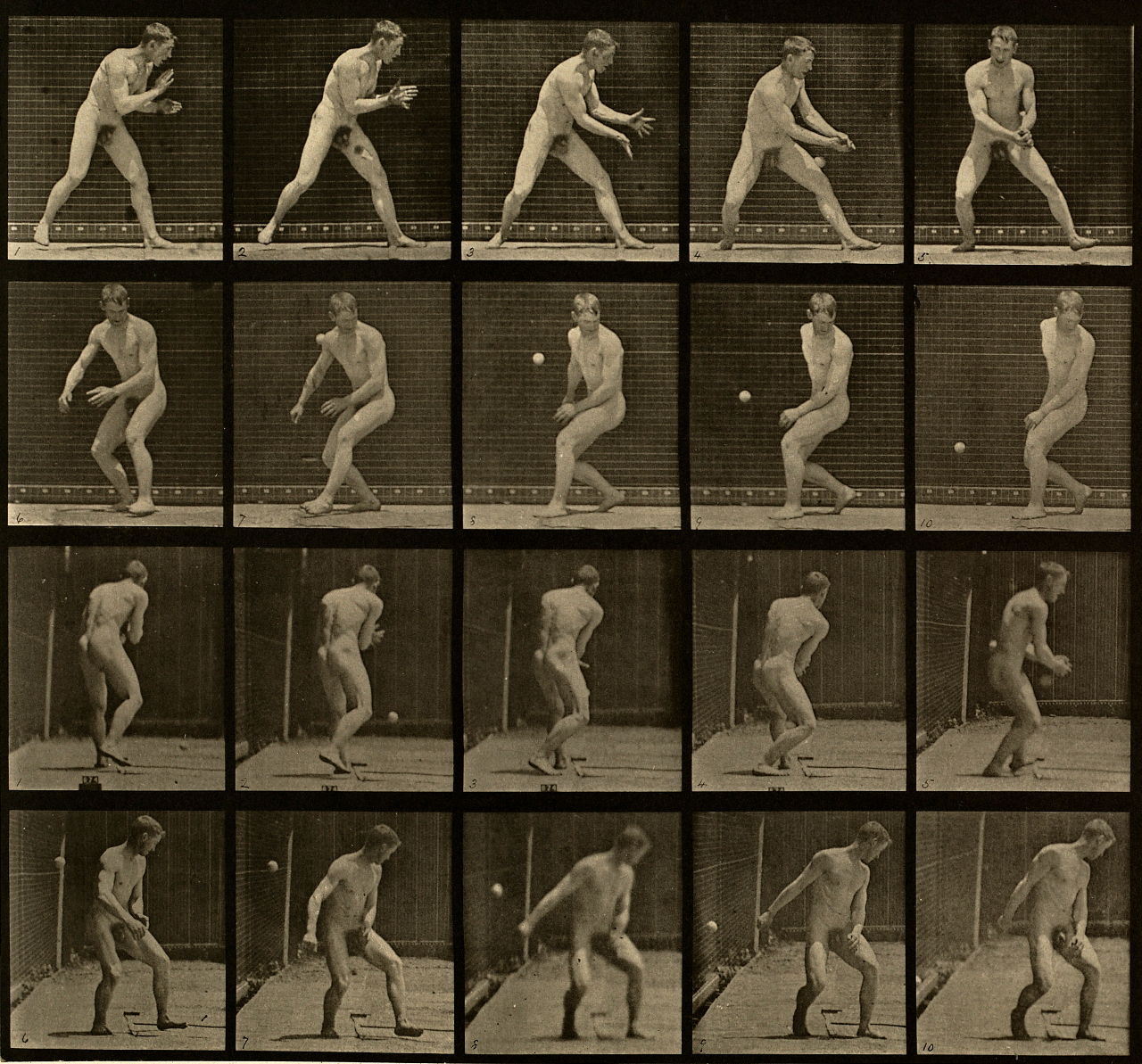
Abb 4: Catcher verpasst den Ball
Fehler in der Bewegungsausführung:
Auch als Folge von Übermüdung kann eine Bewegung abweichen, selbst wenn die Person das richtige Motorprogramm mit den zutreffenden Vorgaben aufgerufen hat.
Schmidt zufolge ist es äußerst wichtig eine bestimmte Fertigkeit in unterschiedlichen Variationen zu üben, sodass eine abstrakte Regel entsteht, die variiert werden kann. Die Schematheorie hat vor allem ihren Wert im Zusammenhang mit ballistischen, schnellen Bewegungen.
In der Engrammtheorie geht man davon aus, dass eine konkrete Handlung bis zur Perfektion einstudiert wird.
Beide Theorien ergänzen einander: durch langsame Bewegungen baut man das Engramm auf, das man in der Form eines Recallschemas lernt anzupassen in alltäglichen Handlungen.
Demzufolge entsteht die Fertigkeit nicht nach einem Versuch, die Entwicklung wird sich erst nach einigen Wochen zeigen.
Der Open-loop Ansatz
Open-loop bedeutet, dass die Re-Afferenz keine besondere Rolle spielt bei der Ausführung der motorischen Handlung. Der motorische Auftrag führt zur Ausführung der Bewegung; es besteht kein geschlossener Kreislauf. Ein Beispiel für eine derartige Bewegung ist der Tsuki (Schlag mit der Faust) aus den Kampfkünsten – bei der Stoßbewegung ist die Re-Afferenz nicht ausschlaggebend.
Der Grundgedanke ist, dass zu jeder Art von Bewegung ein Motorprogramm gehört, das gespeichert ist im Langzeitgedächtnis. Hierzu gehören alle Daten, die die Bewegung charakterisieren.
Nach Abschluss eines Lernprozesses sind diese Daten zusammengestellt: die Bewegung kann selbstverständlich und automatisch ausgeführt werden.
Die Rolle des Kleinhirns
Das Cerebellum spielt eine wichtige Rolle bei der Perfektionierung von Bewegungen.
Im Kleinhirn werden zwei Signale miteinander verglichen, die interne und die externe Rückkopplung. D. h., dass das Bild der Bewegung (Engramm) verglichen wird mit der tatsächlichen Ausführung (Re-Afferenz).
Mithilfe des Cerebellums können Bewegungen – sind sie einmal eingeleitet – fortlaufend angepasst, korrigiert und somit perfektioniert werden.
Das Cerebellum hat v. a. drei Funktionen:
- Regulierung des Gleichgewichts und des Tonus der axialen Muskulatur; Abstimmung der Augenbewegungen auf die des Kopfs,
- Korrigierender Einfluss auf Bewegungen der Gliedmaßen,
- Beitrag an der Initiierung und Planung von Bewegungen.
Heterarchie des Nervensystems
Die zentralen Effektoren können nur dann eine adäquate Bewegungskoordination steuern, wenn sie geschmeidig reagieren auf die Gesamtheit der afferenten Signale.
In der Theorie von Bernstein wird darauf hingewiesen, dass das Verhältnis zwischen Impuls und Bewegung nicht bindend ist. Abhängig vom Kontext kann derselbe Impuls unterschiedliche Bewegungen auslösen. Das folgende Beispiel macht den Zusammenhang deutlich: Im Stand hängt der Arm gestreckt neben dem Körper. Wenn man den Arm in die Mitte führen möchte, ist der Pectoralis major ein guter Kandidat zur Ausführung einer Adduktion.
Wenn der Arm aber horizontal ausgestreckt wird, verändert der Pectoralis major seine Funktion: in diesem Fall würde er ihn vom Körper wegbewegen. Das liegt an dem veränderten Winkel, den der Muskel im Gelenk einnimmt. Kurz gesagt, die Funktion des Muskels ist vom Kontext abhängig.
Ausgangspunkt von Bernstein ist die vorherrschende Rolle der afferenten Systeme, bei der motorischen Ansteuerung.
Die erste Komponente der menschlichen willkürlichen oder bewussten Bewegung ist die Absicht, die dahinter steckt. Die ist beim Menschen übrigens selten eine einfache direkte Antwort auf einen externen Reiz, eher ist sie gerichtet auf zukünftige Bedürfnisse. In der russischen Psychologie wird dieser Zusammenhang als Antizipation bezeichnet.
Die Intention (Absicht) kann als Plan bezeichnet werden, der das Ziel der Handlung angibt. Die höchsten zentralen Niveaus bestimmen die Regeln, die auf Basis der individuellen Bewegungsgrammatik aufgestellt werden. Auf den niedrigeren Niveaus wird das abstrakte Programm übersetzt in muskelspezifische Kommandos. Diese Kommandos sorgen wiederum für afferente Information, welche via Rückkopplungsmechanismen zum zentralen Nervensystem geleitet werden.
Durch die Versorgung mit afferenten Informationen kontrollieren die niedrigeren Strukturen die höheren Niveaus des zentralen Nervensystems.
Selbstbild und Gleichgewicht
Die Entstehung des Selbstbildes
Am Anfang unseres Lebens, wenn das Selbstbild sich entwickelt, folgen die Veränderungen rasch aufeinander. Neue Arten von Handlungen die gestern die Möglichkeiten des Kindes überstiegen sind auf einmal möglich. Einige Wochen nach der Geburt beginnt das Baby zu sehen; später wird es in der Lage sein zu gehen und zu sprechen. Die eigenen Erfahrungen des Kindes werden gemeinsam mit seinem biologischen Erbe allmählich eine persönliche Weise des Stehens, Gehens, Sprechens, Fühlens, Zuhörens und allen anderen Handelns, die dem menschlichen Leben Inhalt verleihen, zustande bringen. Aber wohingegen oberflächlich betrachtet das Leben des einen Menschen beinahe identisch mit dem des anderen ist, zeigen sich bei näherer Betrachtung große Unterschiede.
Wenn bestimmte Zellen in der motorischen Rinde stimuliert werden, kommen bestimmte Muskeln in Bewegung. Heutzutage wissen wir, dass die Verbindung zwischen den Kortexzellen und den Muskeln, die durch diese in Bewegung gebracht werden keine absolute ist, geschweige denn eine exklusive.
Der Kontakt des Babys mit der Außenwelt kommt in erster Linie über die Lippen zustande; damit erkennt es seine Mutter. Später wird es auch seine Hände zu gebrauchen lernen um die Arbeit der Lippen zu unterstützen und wird so durch Betasten mit seinen Händen erfahren was es dank seiner Lippen bereits wusste. Von jetzt an wird es mehr und mehr die übrigen Teile des Körpers entdecken und die Verhältnisse zwischen ihnen. So wird er einen ersten Eindruck von Abstand und Umfang erhalten. Das Wahrnehmen der Zeit beginnt mit der Koordination der Atmung und durch das Schlucken.
Bei einem einen Monat alten Baby wird der Homunculus auf der somatomotorischen Hirnrinde übereinstimmend sein mit der Figur seines Körpers. Die Lippen und der Mund nehmen den größten Teil des Homunculus ein. Die Muskeln, die ihm später helfen werden, die Schwerkraft zu überwinden sind dem Willen noch nicht Untertan. Auch die Handmuskulatur gehorcht nur selten seinem Willen. Der Homunculus wird den Körper in der Form von vier dünnen Strichen – für die Gliedmaßen – angeben, die mit einem fünften Strich (für den Rumpf) verbunden sind, wohingegen die Lippen und der Mund den größten Teil des Abbildes formen.
Bei einem weiter entwickelten Kind, das bereits gehen und schreiben kann, nimmt der Homunculus eine ganz andere Gestalt an. Die Lippen und der Mund nehmen auch nun wieder einen großen Teil ein, da die Funktion der Sprache – wobei die Zunge, die Lippen und der Mund mit einbezogen sind – dem ersten Abbild hinzugefügt sind. Darüber hinaus ist Repräsentation des Daumens viel größer als zu Beginn. Und der rechte Daumen nimmt einen größeren Platz ein als der linke. Der Daumen hat Anteil an fast jeder Bewegung der Hand, vor allem beim Schreiben.
Wenn wir alle Jahre wieder diese Figur betrachten würden, dann würde das nicht nur jedes Mal ein anderes Bild zeigen, sondern es wären auch von Individuum zu Individuum große Unterschiede sichtbar. Bei jemandem, der nicht das Schreiben erlernt hat, würden die Repräsentationen des Daumens klein bleiben, da eine Vielzahl an Zellen – die für das Schreiben nötig sind – ungenutzt blieben. Das Gebiet des Ringfingers wäre bei jemandem, der ein Musikinstrument zu spielen gelernt hat, größer als bei jemandem, der das nicht erlernt hat.
Unser Selbstbild besteht nur aus den Zellen, die wir tatsächlich in Verwendung haben. Deshalb ist es in Wirklichkeit auch kleiner als es sein könnte. Es ist abhängig vom Input. Mehr Input formt ein größeres Selbstbild.
Jemand, der auf seinem Rücken liegt und probiert, sich Stück für Stück auf seinen gesamten Körper, also systematisch auf alle Teile davon zu konzentrieren, wird feststellen, dass man sich bestimmte Stellen leicht bewusst machen kann, wohingegen andere eher außerhalb des Bewusstseins bleiben.
Die Teile, die wir tagtäglich gebrauchen, können wir uns auch am einfachsten bewusst machen. Dagegen spielen die Teile wohl eine eher untergeordnete Rolle, die wir uns schwer bewusst machen können.
Das Einschätzen der Abmessungen unterscheidet sich je nach Körperglied. Unsere somatotopische Repräsentation einer Gliedmaße (das Abbild) braucht nicht mit dem tatsächlichen Umfang übereinzustimmen. Der Unterschied kann bis zu 300 Prozent betragen! Die Weise, wie jemand seine Schultern, seinen Kopf oder seinen Magen hält, seine Stimme einsetzt, sein Gesichtsausdruck einsetzt, wie man sein Gleichgewicht hält und sich verhält, basieren allesamt auf seinem Selbstbild. Aber das Bild kann klein gehalten werden oder gerade übertrieben groß gemacht sein um zu der Maske zu passen, womit man sich seinen Mitmenschen zeigt.
Das Gleichgewichtssystem
Der Mensch benötigt bei allen Handlungen sein Gleichgewicht und somit auch kontinuierliche sinnvolle Information über seine Haltung und seine Bewegungen: Diese Informationen stellt ein kompliziertes Sinneszellensystem zur Verfügung. Darin spielen neben dem Gleichgewichtsapparat auch der Visus und die Propriozeption eine große Rolle.
Für die räumliche Orientierung und die Regulierung des Haltungsgleichgewichts, für die Fortbewegung und die Blickstabilisierung steht dem Menschen ein kompliziertes Mess- und Regelsystem zur Verfügung. Das Gleichgewichtsorgan im Innenohr reagiert vor allem auf Beschleunigungen: es informiert uns über die Position und die Bewegungen des Kopfes im Raum. Unter normalen Umständen sieht der Mensch mithilfe des visuellen Systems auch welche Bewegungen in Bezug auf die Umgebung gemacht werden und welche Haltung eingenommen wird. Das Empfinden einer Bewegung ist relativ: das visuelle System kann nicht unterscheiden zwischen einer Bewegung des Kopfes oder einer Bewegung der Umgebung (Im Zug am Bahnhof: Fährt mein Zug oder bewegt sich der benachbarte?). Das propriozeptive System vermittelt Informationen aus der Muskulatur, die bei der Stützmotorik und der Fortbewegung beansprucht werden. Vor allem die Rezeptoren des Nackens liefern Information über die Bewegung und den Stand des Kopfes in Bezug auf den Rumpf.
Auch andere Rezeptoren des Körpers, so wie etwa Blutdruckrezeptoren, liefern Informationen aus denen abgeleitet werden kann, ob wir selbst oder die Umgebung in Bewegung sind, ob wir still stehen oder ob wir eine ungewöhnliche Stellung im Raum einnehmen.
Die vestibuläre, visuelle, propriozeptive und andersartige Informationen werden im Kleinhirn, in den vestibulären Kernen und in der Formatio reticularis im Hirnstamm integriert. Eine sauber eingestelltes System führt zu einer korrekten Interpretation des multisensoriell wahrgenommenen Stimulationsmusters. Dies führt zu einer adäquaten räumlichen Ausrichtung, zu einer korrekten Abstimmung des Haltungsgleichgewichts und der Blickrichtung.
Bei näherer Betrachtung des Gleichgewichtssystems fällt auf, dass das visuelle System – im Vergleich zu anderen Sinnessystemen – bei der Regulierung ruhiger und gleichmäßiger Augenbewegungen eine dominierende Rolle spielt. Bei schnellen, abrupten Kopfbewegungen wird es vom vestibulären System kontrolliert. Für das Haltungsgleichgewicht spielt das propriozeptive System die größte Rolle, unterstützt durch das visuelle System.
Die Funktion des gesamten Gleichgewichtssystems wird ständiger Anpassung und Eichung unterzogen, um eine optimale Funktion zu ermöglichen.
Ich kann mir vorstellen, dass eine Störung im Selbstbild, beispielsweise durch Schmerz im Knie, über das propriozeptive System Veränderungen im Gesamtgleichgewichtssystem erzeugt!
Nach außen hin zeigt sich eine derartige Veränderung als skoliotische Wirbelsäule. Bei einem Widerspruch zwischen Selbstbild und Gleichgewicht können Asymmetrien auftreten, welche der Betroffene nicht bemerken muss!
Wenn man einen Betroffenen bittet, sich auf den Rücken zu legen, dann kann man häufig feststellen, dass er eine deviierte Haltung einnimmt. Wenn man diese Person alsdann gerade ausrichtet bekommt man noch häufiger zu hören, dass sich das nun schief anfühle: Das sensomotorische System hat sich an den veränderten Input angepasst und die schiefe Haltung als normal akzeptiert!
Möglichkeiten
Gewohnheiten können sowohl gute als auch schlechte Folgen haben für die Partizipation der betroffenen Person. Ein fehlerhaftes Bewegungsmuster kann beibehalten werden, wenn keine Bewusstwerdung stattfindet.
Durch mindestens 3000-fache Wiederholung eines bestimmten Bewegungsmusters formen sich neue Schaltungen auf allen Niveaus des Nervensystems. Dadurch kann eine neue Fertigkeit angelernt oder eine gewohnte ersetzt werden.
Das bedeutet nicht, dass eine bestimmte Übung stundenlang hintereinander eingeübt wird, sondern, dass sich im Laufe von Wochen eine Veränderung manifestiert!
Dadurch finden strukturelle und funktionelle Veränderungen auf spinalem, zerebellarem, limbischem und zerebralem Niveau statt.
In erster Linie muss dem Prozess der Bewusstwerdung das Hauptaugenmerk geschenkt werden. Das bedeutet, dass man erst von seinem Körper und von bestimmten Bewegungsmustern bewusst werden muss. Und hier setzt die Therapie an: Ich biete dem Betroffenen eine Wahlmöglichkeit an.
Feldenkrais zufolge ist es äußerst wichtig, diese Wahlmöglichkeit zu haben. Denn dann kann ich lernen zu unterscheiden, zwischen meiner gewohnten und der neuen Bewegung. Er setzt diese bewusste Wahlmöglichkeit sogar mit Freiheit gleich.
Der Aufbau eines korrekten Engramms bildet hierbei den ersten Schritt der Neustrukturierung. Das Basisengramm wird des Weiteren in der Form eines Schemas in unterschiedlichen Ausführungen und veränderten räumlichen Variablen angewendet Und zuletzt zeigt sich eine Veränderung im Alltag.
Abbildungen: www.muybridge.org
Quellen:
- Henderson, Pehoski; Hand function in the child – Mosby – St. Louis – 1995
- Van Cranenburgh, Mulder; Van contractie naar actie – Bohn Stafleu Van Loghum – Houten – 1986
- Boeijen, Bernards; Fysiologie van de spier II – PF-105 – Modulewerkboek – Hogeschool van Arnhem en Nijmegen – 1997
- Feldenkrais; Bewusstheit durch Bewegung – suhrkamp taschenbuch – Frankfurth a. M. – 1996
- Dr. A.J.E.M. Fischer et al; Het menselijk evenwicht – Academische uitgeverij Amersfoort – Enschede – 1993
- Dr. T. Mulder während des Symposiums Funktionelle Gangschule im UMC St. Radboud, Dezember 1999 in Nimwegen: Experimentelle Untersuchung bei Ratten zeigen, dass die somatotopische Repräsentanz derselben Gliedmaße nach 3000-maliger Reizausübung signifikant stärker repräsentiert ist auf der Hirnrinde als zuvor.
Zuletzt bearbeitet am 5. Februar 2025 um 20:40 Uhr.